Commercial drone technology has grown substantially over the past decade through many technological developments signifying the emergence of an ’innovation shock’. Industry research has projected that ”the global drone market is estimated to grow from $2 billion in 2016 to nearly $127 billion in 2020”. These projections draw attention to the increasing interest and possibilities of drone technologies to achieve much greater outcomes for our society than the simple RC toys that commercial drones were known for only a decade ago. Through these advancements, many applications for drone technology have emerged, such as one home automation drone that uses a weight-sensing drone ”to maintain an Eco-friendly environment by removing the garbage dumpsters located outside the home”. Systems like these work in collaboration with IoT microprocessors such as the Raspberry Pi, where such an open-ended system has no limit on the possibilities of applications that can be made. This project aims to show how advanced networking techniques can be used in conjunction with drones to create a mesh network system and wireless device sniffer for disaster recovery.
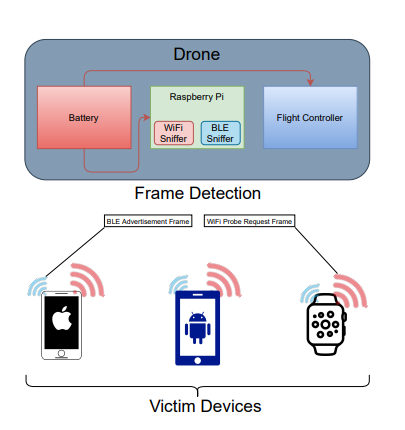
Wireless communications have become one of the backbones of today’s communications infrastructure and are one of the primary ways people receive news and other critical information. In disaster scenarios, often times wireless communications are taken down when cell towers are destroyed or the power grid is disabled. Despite this, people will still likely carry their mobile devices in hopes of communications being restored at some point. Reestablishing wireless communications during an emergency can help deliver important information to those who need it most. Maps, warnings, and evacuation areas can be communicated with those in a disaster area without any physical interaction, allowing manpower to be saved and reallocated. Our mobile devices are also constantly emitting 2 signals in order to facilitate wireless communications. These signals can be used in a disaster scenario to help pinpoint the location of survivors who may be carrying a mobile phone or other devices. A drone equipped with the ability to detect these signals could be leveraged by disaster recovery teams to help locate people, especially those who live in isolated towns in hard-to-reach terrain. There is a high likelihood of an area being populated if many wireless signals are detected by the drone.
The drone kit we used for this project was cleverly designed to be built and operated without much experience or difficulty, which presents an advantage regarding the manufacturability of our system. Holybro provided clear instructions for the assembly of the S500 drone that we believe is suitable for anyone capable of using simple tools. The first challenge in regards to the operation of the drone was the radio calibration process, which was prone to slight malfunctions with the RF transmitters provided. This issue was resolved through the installation of updated drivers, and the mission planning process began. A number of test flights were needed to collect performance data as well as verify that the drone was fully functional.
Planning missions in the QGroundControl software was not a challenge due to the intuitive nature of the program. Using a live map (similar to Google Earth) with the position of the drone provided by the onboard GPS module, the operator of the drone simply places points on the map while setting parameters for each point. These parameters include altitude, hold duration, yaw, and speed. After configuring the missions in QGroundControl the drone was ready for the first test flight, which is where the next challenge presented itself regarding the storage of the battery. Originally, the plan was to design a 3D-printed chassis for the battery and Raspberry Pi that would unify and ensure the security of our components. Our lack of expertise with CAD and limited access to 3D printers during COVID derailed this plan, prompting us to pivot towards securing these components to a metal strip under the drone that was initially designed for a smaller battery. Upon securing the components, we began recording our first flights for the power consumption measurements while moving and hovering.
In order to achieve our use case of deploying a wireless network from a drone, we leveraged a software called hostapd, or Host Access Point Daemon. This software allowed us to turn a normal wireless interface into a wireless access point that other devices could connect to. The software also facilitates routing the connections within the created network to another network, meaning that if we route the connections from the Raspberry Pi to another router with internet access, then so will the network deployed by the Raspberry Pi. We propose using hostapd with a Raspberry Pi device coupled with a drone and battery to facilitate the deployment of a wireless network from one of the wireless interfaces on the Raspberry Pi. Starting with the victim devices, they are connected to the network being facilitated by the Raspberry Pi over the IEEE 802.11n protocol. The Raspberry Pi and drone components are powered by the same battery and are all part of a single physical unit. The Pixhawk 4 flight controller board on the drone allows it to communicate with the QGroundControl software running on the base station computer through the MAVLink protocol. The Raspberry Pi facilitates the network connection through the 802.11ac protocol to the base station, which is the only component that is actually connected to the internet.
One of the challenges of doing our evaluation was trying to find a location that would minimize the ”noise” from other devices not included in our test. We discovered that it was not feasible to perform these tests at home, and had to go to a remote location with no other devices around in order to get more accurate and readable results. During testing, we attempted to find out how frequently WiFi probes and BLE advertisements are sent by mobile devices. Our goal was to determine a period of time, Tw for WiFi and Tb for BLE, which maximizes the chance of detecting the signals emitted by devices. This is the period of time that the drone would have to spend either hovering or slowing down. We want to minimize the amount of time spent hovering,
as it was found to be much more expensive in terms of power usage. We found that BLE advertisements are emitted far more frequently than WiFi probes, and were thus a more reliable signal to look for when attempting to detect the presence of devices. Tb would need to be at most one second, and could reliably assume less without the loss of detection ability. BLE advertisements are sent out far more frequently than the WiFi probes. This means that if a device is within the shorter BLE range, it has a very high chance of having at least one of its advertisements detected. Tw would need to be at minimum 1 minute, as the devices that we tested only emitted roughly 1-4 packet ”bursts” per minute. Even with this longer scan period, there is still a likely chance that some WiFi probes could be missed by the scan. This is due to the fact that TCPDump will constantly change the radio channel it is listening on in order to hit the full spectrum of 802.11, which inevitably causes some of the broadcasted probes to be missed. This means that even if a device is within WiFi range, there is a decent chance that broadcasted probes will not even be seen by the sniffer.
The first component of our system that we would like to see improved in the future is reduced power consumption of not only the drone but network components as well. Regarding drones, there are more than a few improvements to be made that would contribute to reducing power consumption overall. Starting with the battery, we believe a lighter battery could potentially be used without sacrificing too much battery life. Currently, we are using a high-capacity 8000mAh battery that adds considerable weight to the drone and we believe there is room for compromise between the weight and capacity of the battery that could make our system more energy-efficient. Aside from the power consumption alone, we had ideas early in the design phase of our project about using solar-powered chargers for the battery while the system is idle.
With our research on this topic mostly finished, the large capacity of our battery and considerably lower charging speed of solar power was not going to be realistically useful for our current system, as the drone would spend far too much time idle charging with solar power. With that being said, we believe there is a place for solar power in the project; some ideas include an on-board solar panel to continuously provide power to the raspberry pi (leaving all battery power to the drone) and using a lower-capacity battery for the drone that would cut down the idle time of the system. Finally, we planned on 3D printing a chassis for the battery, Raspberry Pi, and antennas. We believe this would increase the uniformity of our system and protect the valuable components from exposure to outside conditions. These minor improvements are the first step to weatherproofing the system and ensuring the most reliable and efficient operation in all conditions.
Another area where future work could be done is to implement a mesh network for drones using LoRa technology. LoRa was a technology that we researched early in development as a way to greatly extend the range of wireless communications at the cost of throughput. We eventually decided that this would be out of the scope of what we wanted to accomplish in our development time frame, however it is an interesting idea to expand upon for future iterations of this project. LoRa would allow the mesh network to function without having to be within range of the base station, offering a truly portable system prepared for the worst possible terrain and conditions. Additionally, it is possible that future 802.11 protocols may be of use to enhance WiFi range and network throughput.
An interesting feature we also wanted to implement during this project was a mobile landing page to collect user information. This landing page would function similarly to that of a public WiFi access point, where users are prompted to authenticate themselves for WiFi access. The plan for us was to have a landing page that required the names and conditions of those in a victim group to be collected and processed in a database. We believe this would help authorities perform accurate head counts of those affected by the disaster to further aid in recovery.
This thesis demonstrates that drone technology has great potential for the future of disaster response and its ability to aid search and rescue teams to more effectively save lives. Using drone technology to perform scans on disaster-affected areas reduces the risk of these search and rescue teams and more effectively locates victims through their devices. The novelty of this project lies in our system’s ability to sniff WiFi and Bluetooth packets to locate where survivors may be, and ultimately save lives. We found that detecting the presence of devices was easiest to do by looking for BLE advertisements. Although having a much shorter range compared to WiFi, it is still much easier to detect the signals due to the sheer frequency in which they are transmitted. An effective way to utilize this would be performing longer-range scans on WiFi to discern a radius of potential victims, then using the more responsive BLE signals to closely pinpoint the location.
Another idea that would both lower power usage and per unit cost would be to exclude the WiFi sniffing feature from the system. While looking for WiFi probes does provide useful insight into how many people may be close by, it is not as accurate and high fidelity as the BLE advertisements are, and thus someone looking for the lowest power configuration or lowest cost unit may be interested in cutting this feature.
In conclusion, we hope this thesis shed some light on the endless possibilities of combining modern drone systems with smart IoT technology, and the potential these systems have to save lives. We also hope to have provided some insight into how disaster recovery and safety authorities can leverage the basic signals that our mobile devices send to help locate or at least estimate how many people are nearby a given area. We are honored to work on a project with this much potential and hope our work will be continued in the future to create a system that contributes to the betterment of our world.








 Loading ...
Loading ...
